Tributación Optima Solución Ramsey
Contenido
Descripción ¶
Esta entrada estudia la política fiscal óptima en un entorno lineal cuadrático
Modificamos ligeramente un modelo conocido modelo de Robert Lucas y Nancy Stokey [LS83] por lo que las fórmulas convenientes para la resolución de los modelos lineales de segundo grado pueden aplicarse al simplificar los cálculos
La economía consiste en un hogar representativo y un gobierno benevolente
El gobierno financia un flujo exógeno de licitaciones de los préstamos contingentes al estado y un impuesto lineal sobre la renta del trabajo
Un impuesto lineal es a veces llamado un impuesto a tanto alzado
El hogar maximiza la utilidad eligiendo caminos para el consumo y el trabajo, que toman los precios y la tasa de impuestos del gobierno y los planes de endeudamiento cuando se dan
La utilidad alcanzable máxima para el hogar depende de los planes fiscales y de endeudamiento del gobierno
El problema de Ramsey [Ram27] es elegir los planes fiscales y de endeudamiento que maximicen el bienestar de la familia, teniendo un comportamiento optimizador de los hogares
Hay un gran número de equilibrios competitivos indexado por políticas fiscales diferentes del gobierno
El planificador de Ramsey elige el mejor equilibrio competitivo
Queremos estudiar la dinámica de las tasas de impuestos, los ingresos fiscales, la deuda del gobierno bajo un plan de Ramsey
Debido a que el modelo de Lucas y Stokey cuenta con deuda pública contingente al estado, la dinámica de la deuda pública difieren sustancialmente de las de un modelo de Robert Barro [Bar79]
El tratamiento que se da aquí sigue de cerca este manuscrito , elaborado por Thomas J. Sargent y Francois R. Velde
Cubrimos sólo las características clave de un problema y dejamos los resultados para la interpretación del interesado
Características Modelo ¶
- Modelo cuadrático lineal (LQ)
- Hogar Representante
- Programación dinámica estocástica en un horizonte infinito
- Impuestos distorsivos
El Problema de Ramsey ¶
Comenzamos describiendo las premisas clave en relación con la tecnología, los hogares y el sector gubernamental
Tecnología ¶
Trabajo se puede convertir uno por uno en una sola, no almacenable bien de consumo
En el habitual espíritu del modelo LQ, la cantidad de trabajo ofrecida en cada período es sin restricciones
Esto no es realista, pero útil cuando se trata de resolver el modelo
La oferta de trabajo realista puede ser inducida por valores de los parámetros adecuados
Los hogares ¶
Considere la posibilidad de un hogar representativo que elige un camino
sujeto a la restricción presupuestaria
Aquí
-
β es un factor de descuento en( 0 , 1 ) -
p0t es el precio del estado en el tiempot -
bt es un parámetro de preferencia estocástico -
dt es un proceso de dotación -
τt es un impuesto único sobre las rentas del trabajo -
st es un prometido de tiempot con pago de cupón de la deuda emitida por el gobierno
La restricción presupuestaria requiere que el valor presente del consumo se limite al valor actual de las dotaciones, las rentas del trabajo y el pago de cupones en la tenencia de bonos
Gobierno ¶
El gobierno impone un impuesto lineal sobre la renta del trabajo, comprometiéndose plenamente a una trayectoria estocástica de las tasas de impuestos a tiempo cero
Asimismo, el gobierno emite deuda contingente al estado
Dados los impuestos del gobierno y los planes de endeudamiento, podemos construir un equilibrio competitivo mediante distorsion de los impuestos del gobierno
Entre todos esos equilibrios competitivos, el plan de Ramsey es el que maximiza el bienestar del consumidor representativo
Las variables exógenas ¶
Dotaciones, el gasto público, el parámetro de preferencia
dt= Sdxt gt= Sgxt bt= Sbxt st= Ssxt
Las matrices
Consideramos dos especificaciones para
-
Caso discreto:
{ xt} es un estado discreto cadena de Markov con matriz de transiciónP -
Caso VAR:
{ xt} obedecext + 1= A xt+ Cwt + 1 donde{ wt} es decir cero independiente de Gauss con identificar matriz de covarianza
Viabilidad ¶
La restricción periodo a periodo de viabilidad de esta economía es
Un proceso en el consumo de mano de obra
La restricción presupuestaria del gobierno ¶
Donde
Equilibrio ¶
Un equilibrio es una asignación factible
-
La asignación
{ ℓt, ct} es óptimo para el hogar determinado{ pt} y{ τt} - La restricción presupuestaria del gobierno (4) está satisfecha
El El problema de Ramsey es elegir el equilibrio
Si
El procedimiento de solución que adoptamos es
-
Utilice las condiciones de primer orden del problema en su casa de precisar los precios y las asignaciones dadas
{ τt} - Utilice estas expresiones para reescribir la restricción presupuestaria del gobierno (4) en términos de variables exógenas y las asignaciones
- Maximizar la función objetivo del hogar (1) sujeto a la restricción de la última etapa y la restricción de factibilidad (3)
La solución a este problema de maximización deja abajo todas las cantidades de interés
Solución ¶
El primer paso es obtener las condiciones de primer orden para el problema de la unidad familiar, tomando los impuestos y los precios como dados
Dejando
Reorganizar y normalizando en
Sustituyendo (5) en la restricción presupuestaria del gobierno (4) rendimientos
El problema de Ramsey ahora consiste en maximizar (1) sujeto a (6) y (3)
El lagrangiano asociado es
Las condiciones de primer orden asociadas a
y
La combinación de estas dos últimas igualdades con (3) y el trabajo a través de la álgebra, se puede demostrar que
donde
ν: = λ / ( 1 + 2 λ ) ℓ¯t: = ( bt- dt+ gt) / 2 c¯t: = ( bt+ dt- gt) / 2 mt: = ( bt- dt- st) / 2
Aparte de
Para resolver
El término dentro de los corchetes en (6) es
Uso de (8) , las definiciones anteriores y el hecho de que
Volver a insertar en (6) , obtenemos
Aunque puede que no sea clara, sin embargo, casi hemos llegado:
- Los dos expectativas términos en (9) se pueden resolver en términos de primitivas modelo
-
Esto a su vez nos permite resolver para el multiplicador de Lagrange
ν -
Con
ν en la mano, podemos volver atrás y resolver las asignaciones a través de (8) - Una vez que tenemos las asignaciones, los precios y el sistema tributario se puede derivar de (5)
Resolver el término cuadrático ¶
Vamos a considerar cómo obtener el término
Si somos capaces de resolver las dos sumas esperados
entonces el problema se reduce a resolver
para
A condición de que
Vamos a encontrar la manera de resolver los términos de expectativas en (10)
Para el primero, la variable aleatoria
Para el segundo expectativa en (10) , la variable aleatoria
Se deduce que ambas de estas expectativas términos son casos especiales de la expresión
donde
Supongamos primero que
En este caso, la fórmula para calcular
-
Q es la solución aQ = H+ βLa'Q A Y v = rastro( C'Q C) β/ ( 1 - β)
La primera ecuación se conoce como una ecuación de Lyapunov discreta, y se puede resolver utilizando esta función
Siguiente suponer que
Supongamos además que cada
Dejar
Por ejemplo, en la discusión anterior,
Es legítimo que pasar la expectativa a través de la suma, lo que lleva a
Aquí
-
Pt es elt poder-ésima de la matriz de transiciónP -
h es decir, con algún abuso de notación, el vector( h ( x1) , ... , h ( xN) ) -
( Pth ) [ j ] indica laj elemento -th dePth
Puede ser muestran que (12) es de hecho igual a la
Este último hecho se aplica en los cálculos siguientes
Otras variables ¶
Estamos interesados en el seguimiento de varias otras variables además de los descritos anteriormente
Uno de ellos es el valor presente de las obligaciones del gobierno en circulación al momento
Usando nuestra expresión de los precios y el plan de Ramsey, también puede escribir
Esta variación es más conveniente para la computación
Sin embargo, otra manera de escribir
donde
Aquí
Además, dejando
y
El término
Si distorsionamos probabilidades de transición de paso por el factor de ajuste
entonces
Vamos a ocuparnos del cómputo
Aplicación ¶
El siguiente código proporciona funciones para
- Resolviendo para el plan de Ramsey dada una especificación de la economía
- La simulación de la dinámica de las principales variables
El archivo es casos / lqramsey.py desde el repositorio principal
Descripción y aclaraciones se dan a continuación
"" "
Nombre de archivo: lqramsey.py
Autores: Thomas Sargent, Doc-Jin Jang, Jeong-hun Choi, John Stachurski
Este módulo proporciona código para calcular equilibrios Ramsey en una economía LQ con
los impuestos distorsivos. El programa calcula las asignaciones (consumo,
ocio), las tasas de impuestos, los ingresos, el valor presente neto de la deuda y otras
cantidades relacionadas.
Funciones para trazar los resultados también se proporcionan a continuación.
Ver la conferencia en https://quant-econ.net/lqramsey.html para una descripción de
la modelo.
"" "
import sys
import numpy as np
from numpy import sqrt , eye , dot , zeros , cumsum
from numpy.random import randn
import scipy.linalg
import matplotlib.pyplot as plt
from collections import namedtuple
from quantecon import nullspace , mc_sample_path , var_quadratic_sum
# == Configurar una namedtuple para almacenar datos en el modelo de la economía == #
Economía = namedtuple ( 'economía' , ( 'beta' , # Factor de descuento 'Mx' , # Gbno matriz selector de gasto 'SD' , # selector dotación exógena matriz "Sb" , # Utilidad matriz selector de parámetros 'SS' , pagos # promocionales matriz selector 'discretas' , # discreta o continua - boolean 'proc' )) parámetros de proceso # estocásticos
# == Configurar una namedtuple para almacenar valores de retorno para compute_paths () == #
Sendero = namedtuple ( 'ruta' , ( 'g' , el gasto # Gob 'd' , # Dotación 'b' , # parámetro de cambio Utilidad 's ' , # cupón de pago de la deuda existente 'c' , # Consumo 'l' , # Trabajo 'p' , # Precio 'tau' , # Tipo impositivo 'rvn' , # Ingresos 'B' , # Gbno deuda 'R' , # Riesgo retorno bruto libre 'pi' , # tasa de interés libre de riesgo de un período de 'Pi' , # tasa acumulativa de retorno, ajustado 'xi' )) # factor de ajuste para Pi
def compute_paths ( T , econ ): "" "
trayectorias temporales simuladas Calculadaspara las variables exógenas y endógenas.
Parámetros
===========
T: int
Longitud de la simulación
econ: un registro del tipo 'Economía', que contiene
beta - Factor de Descuento
Mx - Gobierno matriz selector de gasto
Sd - matriz selector dotación exógena
Sb - Utilidad de matriz selector de parámetros
Ss - Los pagos de cupones de la matriz de selección
discreto - proceso exógeno discreto (Verdadero o Falso)
proc - parámetros de proceso estocástico
Devoluciones
========
camino: un namedtuple del tipo 'Camino', que contiene
g - Gobierno invierte
d - Dotación
b - Utilidad parámetro de desplazamiento
s - pago de cupón de la deuda existente
c - Consumo
l - Trabajo
p - Precio
tau - Tipo impositivo
rvn - Ingresos
B - El Gobierno de la deuda
R - Riesgo retorno bruto libre
pi - Un período de tasa de interés libre de riesgo
Pi - tasa acumulativa de retorno, ajustado
xi - Factor de Ajuste por Pi
Los valores correspondientes son ndarrays numpy planas.
"" "
# == Nombres Simplificar == # beta , Mx , Sd , Sb , Ss = econ . beta , econ . Sg , econ . Sd , econ . Sb , econ . Ss
si econ . discreta : P , x_vals = econ . proc cosa : A , C = econ . proc
# == Simular el proceso exógeno x == # si econ . discreta : estado = mc_sample_path ( P , init = 0 , SAMPLE_SIZE = T ) x = x_vals [:, estado ] otro : # == Generar una condición x0 x0 satisfacer inicial = A x0 == # nx , nx = A . forma x0 = espacio nulo (( ojo ( nx ) - A )) x0 = - x0 si ( x0 [ nx - 1 ] < 0 ) otro x0 x0 = x0 / x0 [ nx - 1 ]
# == Generar una serie de tiempo x de longitud T a partir de x0 == # nx , nw = C . shape x = zeros (( nx , T )) w = randn ( nw , T ) x [:, 0 ] = x0 . T for t in range ( 1 , T ): x [:, t ] = dot ( A , x [:, t - 1 ]) + dot ( C , w [:, t ])
# == Compute secuencias variables exógenas == # g , d , b , s = ( dot ( S , x ) . aplanan () para S en ( Mx , Sd , Sb , Ss ))
# == Resuelve para multiplicadores de Lagrange en la restricción presupuestaria Gbno == # # De hecho resolvemos para nu = lambda / (1 + 2 * lambda). Aquí nu es la solución # para una ecuación cuadrática un (nu ** 2 - nu) + b = 0 donde # ayb se espera sumas descontadas de formas cuadráticas del estado. Sm = Sb - Sd - Ss # == Calcula a y b ==
# == Prueba que nu tiene una solución real antes de asignar == # warning_msg = "" "
Sugerencia:. es probable que establecer el gasto público también {} Elegir un {}
. Congreso y empezar de nuevo
"" " disco = a0 ** 2 - 4 * a0 * b0 si disco > = 0 : nu = 0.5 * ( a0 - sqrt ( disco )) / a0 demás : print ( ". No hay equilibrio Ramsey para estos parámetros" ) print ( warning_msg . formato ( "alto" , 'republicano' )) sys . de salida ( 0 )
# == Prueba de que el multiplicador de Lagrange tiene el signo correcto == # si nu * ( 0,5 - nu ) < 0 : print ( ". multiplicador negativo en la restricción presupuestaria del gobierno" ) print ( warning_msg . formato ( 'bajo' , ' 'Democrática )) sys . de salida ( 0 )
# == Resuelva para el nu yx asignación dada == Precio sin normalización tau = 1 - l / ( b - c ) rvn = l * tau
# == Compute variables restantes == # if econ . discrete : H = dot ( Sb - Sc , x_vals ) * dot ( Sl - Sg , x_vals ) - dot ( Sl , x_vals ) ** 2 temp = dot ( F , H . T ) . flatten () B = temp [ state ] / p H = dot ( P [ state , :], dot ( Sb - Sc , x_vals ) . T ) . flatten () R = p / ( beta * H ) temp = dot ( P [ state , :], dot ( Sb - Sc , x_vals ) . T ) . flatten () xi = p [ 1 :] / temp [: T - 1 ] else : H = dot ( Sl . T , Sl ) - dot (( Sb - Sc ) . T , Sl - Sg ) L = np . empty ( T ) for t in range ( T ): L [ t ] = var_quadratic_sum ( A , C , H , beta , x [:, t ]) B = L / p Rinv = ( beta * dot ( dot ( Sb - Sc , A ), x )) . flatten () / p R = 1 / Rinv AF1 = dot ( Sb - Sc , x [:, 1 :]) AF2 = dot ( dot ( Sb - Sc , A ), x [:, : T - 1 ]) xi = AF1 / AF2 xi = xi . flatten ()
pi = B [ 1 :] - R [: T - 1 ] * B [: T - 1 ] - rvn [: T - 1 ] + g [: T - 1 ] Pi = cumSum ( pi * xi )
# == Preparar valores de retorno == # ruta = Camino ( g = g , d = d , b = b , s = s , c = c , l = l , p = p , tau = tau , rvn = rvn , B = B , R = R , pi = pi , pi = pi , xi = xi )
retorno camino
def gen_fig_1 ( ruta ): "" "
El parámetro es el namedtuple ruta devuelta por compute_paths (Ver).
la cadena de documentación de esa función para más detalles.
"" "
T = len ( camino . c )
# == == Preparar ejes # num_rows , num_cols = 2 , 2 fig , axes = plt . subplots ( num_rows , num_cols , figsize = ( 14 , 10 )) plt . subplots_adjust ( hspace = 0.4 ) for i in range ( num_rows ): for j in range ( num_cols ): axes [ i , j ] . grid () axes [ i , j ] . set_xlabel ( r'Time' ) bbox = ( 0. , 1.02 , 1. , . 102 ) legend_args = { 'bbox_to_anchor' : bbox , 'loc' : 3 , 'mode' : 'expand' } p_args = { 'lw' : 2 , 'alpha' : 0.7 }
# == Consumo Plot, los gastos y los ingresos Gbno == # ax = ejes [ 0 , 0 ] hacha . parcela ( camino . rvn , etiqueta = r '$ \ tau_t \ell_t$' , ** p_args ) ax . plot ( path . g , label = r'$g_t$' , ** p_args ) ax . plot ( path . c , label = r'$c_t$' , ** p_args ) ax . legend ( ncol = 3 , ** legend_args )
# == Gasto gob Terreno y la deuda == # ax = ejes [ 0 , 1 ] hacha . parcela ( lista ( rango ( 1 , T + 1 )), camino . rvn , etiqueta = r '$ \ tau_t \ell_t$' , ** p_args ) ax . plot ( list ( range ( 1 , T + 1 )), path . g , label = r'$g_t$' , ** p_args ) ax . plot ( list ( range ( 1 , T )), path . B [ 1 : T ], label = r'$B_{t+1}$' , ** p_args ) ax . legend ( ncol = 3 , ** legend_args )
# == Retorno libre de riesgo Argumento == # ax = ejes [ 1 , 0 ] hacha . parcela ( lista ( rango ( 1 , T + 1 )), camino . R - 1 , label = r '$ R_t - 1 $' , ** p_args ) hacha . leyenda ( ncol = 1 , ** legend_args )
# == Ingresos Terreno, el gasto y la tasa libre de riesgo == # ax = ejes [ 1 , 1 ] hacha . parcela ( lista ( rango ( 1 , T + 1 )), camino . rvn , etiqueta = r '$ \ tau_t \ell_t$' , ** p_args ) ax . plot ( list ( range ( 1 , T + 1 )), path . g , label = r'$g_t$' , ** p_args ) axes [ 1 , 1 ] . plot ( list ( range ( 1 , T )), path . pi , label = r'$\pi_{t+1}$' , ** p_args ) ax . legend ( ncol = 3 , ** legend_args )
plt . mostrar ()
def gen_fig_2 ( ruta ): "" "
El parámetro es el namedtuple ruta devuelta por compute_paths (Ver).
la cadena de documentación de esa función para más detalles.
"" "
T = len ( camino . c )
# == == Preparar ejes # num_rows , num_cols = 2 , 1 fig , axes = plt . subplots ( num_rows , num_cols , figsize = ( 10 , 10 )) plt . subplots_adjust ( hspace = 0.5 ) bbox = ( 0. , 1.02 , 1. , . 102 ) bbox = ( 0. , 1.02 , 1. , . 102 ) legend_args = { 'bbox_to_anchor' : bbox , 'loc' : 3 , 'mode' : 'expand' } p_args = { 'lw' : 2 , 'alpha' : 0.7 }
# == Factor de ajuste Argumento == # ax = axes [ 0 ] ax . plot ( list ( range ( 2 , T + 1 )), path . xi , label = r'$\xi_t$' , ** p_args ) ax . grid () ax . set_xlabel ( r'Time' ) ax . legend ( ncol = 1 , ** legend_args )
# == Argumento ajustado rentabilidad acumulada == # ax = axes [ 1 ] ax . plot ( list ( range ( 2 , T + 1 )), path . Pi , label = r'$\Pi_t$' , ** p_args ) ax . grid () ax . set_xlabel ( r'Time' ) ax . legend ( ncol = 1 , ** legend_args )
plt . mostrar ()
Comentarios sobre el Código ¶
La función var_quadratic_sum importado de quadsums es para calcular el valor de (11) cuando el proceso exógeno
Por debajo de la definición de la función, podrás ver las definiciones de dos namedtuple objetos, Economía y Ruta
El primero se utiliza para recoger todos los parámetros y las primitivas de una economía LQ dado, mientras que el segundo recoge la salida de los cálculos
En Python, un namedtuple es un tipo de datos populares desde la colecciones módulo de la biblioteca estándar que replica la funcionalidad de una tupla, sino que también le permite asignar un nombre a cada elemento de la tupla
Estos elementos pueden ser entonces referencias través de la notación atributo de puntos - véase por ejemplo el uso de trayectoria en la función gen_fig_1 ()
Los beneficios de usar namedtuples :
- Mantiene el contenido organizado por sentido
- Ayuda a reducir el número de variables globales
Aparte de eso, nuestro código es largo pero relativamente sencillo
Ejemplos ¶
Veamos dos ejemplos de uso
El Caso Continuo ¶
Nuestro primer ejemplo adopta la especificación VAR descrito anteriormente
En cuanto a las primitivas, establecemos
β= 1 / 1,05 -
bt= 2.135 yst= dt= 0 para todost
El gasto del gobierno evoluciona de acuerdo a
con
Aquí está el código, a partir de archivos de ejemplos / lqramsey_ar1.py
"" "
Nombre de archivo: lqramsey_ar1.py
Autores: Thomas Sargent, Doc-Jin Jang, Jeong-hun Choi, John Stachurski
Ejemplo 1: el gasto de Gobierno es AR (1) y el Estado es (g, 1).
"" "
importar numpy como np
de numpy importación gama
importación lqramsey
# == == Parámetros #
beta = 1 / 1.05
rho , mg = . 7 , . 35
A = np . identity ( 2 )
A [ 0 , :] = rho , mg * ( 1 - rho )
C = np . zeros (( 2 , 1 ))
C [ 0 , 0 ] = np . sqrt ( 1 - rho ** 2 ) * mg / 10
Sg = array (( 1 , 0 )) . reshape ( 1 , 2 )
Sd = array (( 0 , 0 )) . reshape ( 1 , 2 )
Sb = array (( 0 , 2.135 )) . reshape ( 1 , 2 )
Ss = array (( 0 , 0 )) . reshape ( 1 , 2 )
economía = lqramsey . Economía ( beta = beta , Sg = Sg , Sd = Sd , Sb = Sb , Ss = Ss , discreta = False , proc = ( A , C ))
T = 50
camino = lqramsey . compute_paths ( T , economía )
lqramsey . gen_fig_1 ( ruta )
Ejecutar el programa produce la figura
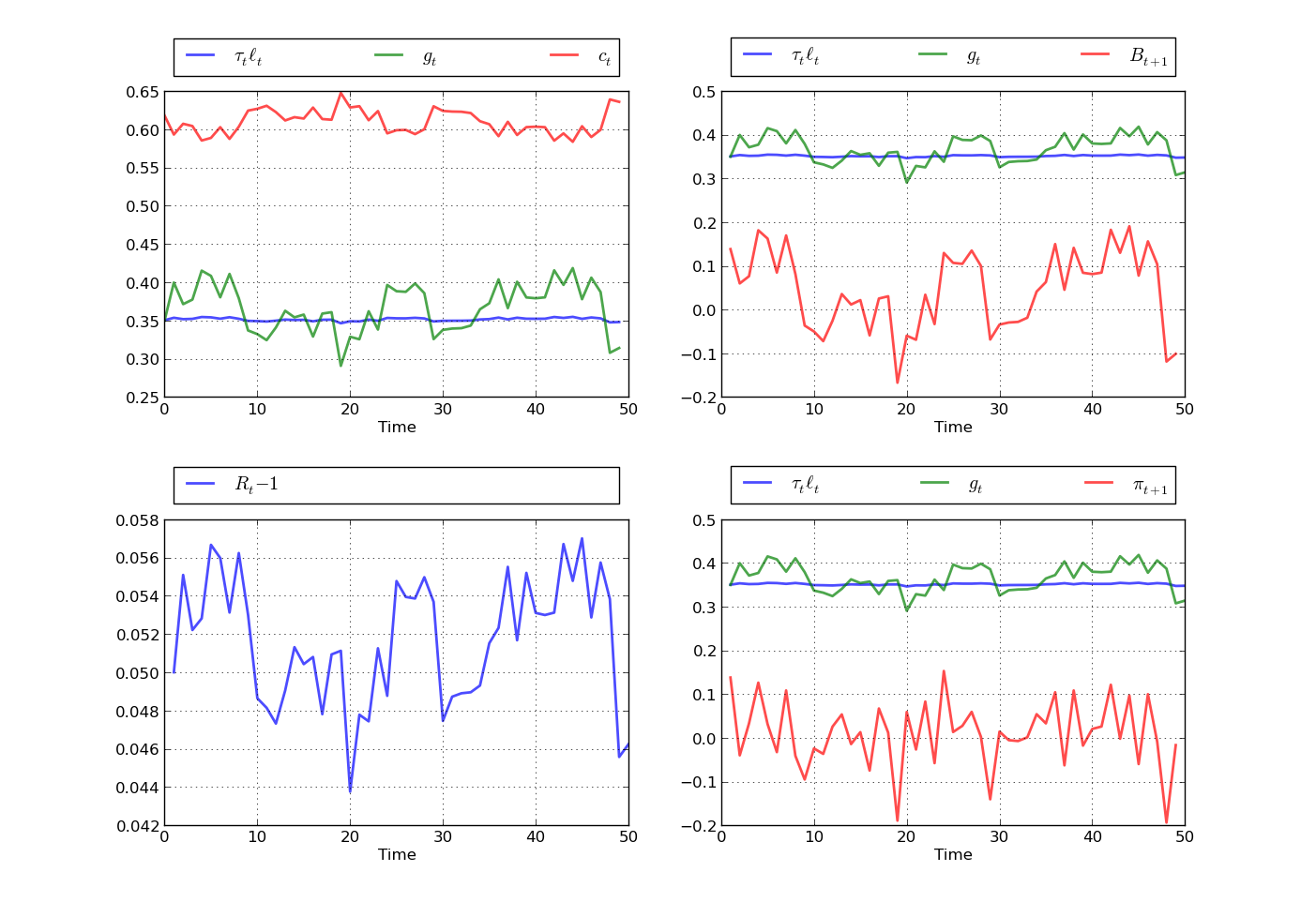
Las leyendas sobre las cifras indican las variables siendo rastreados
El más obvio de la figura es nivelación de los impuestos en el sentido de que los ingresos fiscales es mucho menos variable que el gasto público
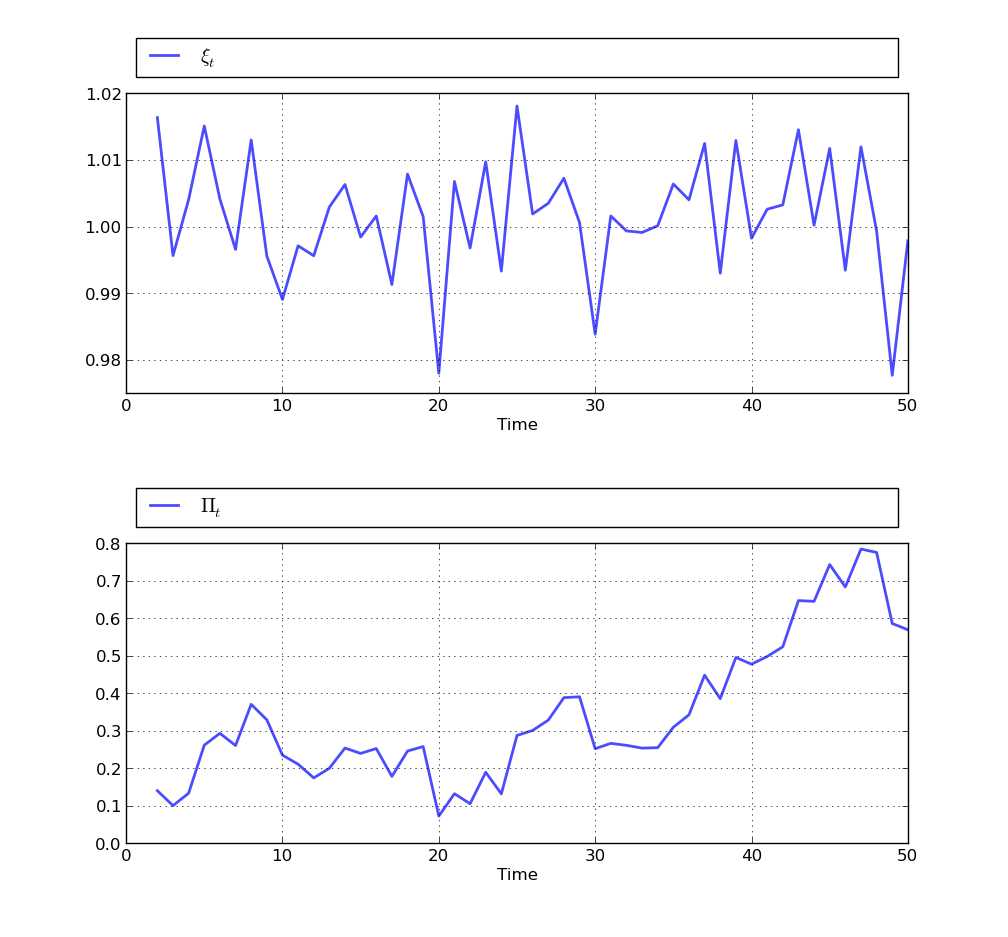
Después de ejecutar el código anterior, si a continuación, ejecuta lqramsey.gen_fig_2 (camino) de su IPython pagar usted producirá la figura
La caso discreto ¶
Nuestro segundo ejemplo adopta una especificación de Markov para el proceso exógeno
Aquí está el código, a partir de archivos de ejemplos / lqramsey_discrete.py
"" "
Nombre de archivo: lqramsey_discrete.py
Autores: Thomas Sargent, Doc-Jin Jang, Jeong-hun Choi, John Stachurski
Modelo LQ Ramsey y los procesos exógenos discretos.
"" "
de numpy importación gama
importación lqramsey
# == == Parámetros #
beta = 1 / 1,05
P = array ([[ 0.8 , 0.2 , 0.0 ], [ 0.0 , 0.5 , 0.5 ], [ 0.0 , 0.0 , 1.0 ]])
# == posibles estados del mundo == #
# Cada columna es un estado del mundo. Las filas son [GDBS
economía = lqramsey . Economía ( beta = beta , Sg = Sg , Sd = Sd , Sb = Sb , Ss = Ss , discreta = Verdadero , proc = ( P , x_vals ))
T = 15
camino = lqramsey . compute_paths ( T , economía )
lqramsey . gen_fig_1 ( ruta )
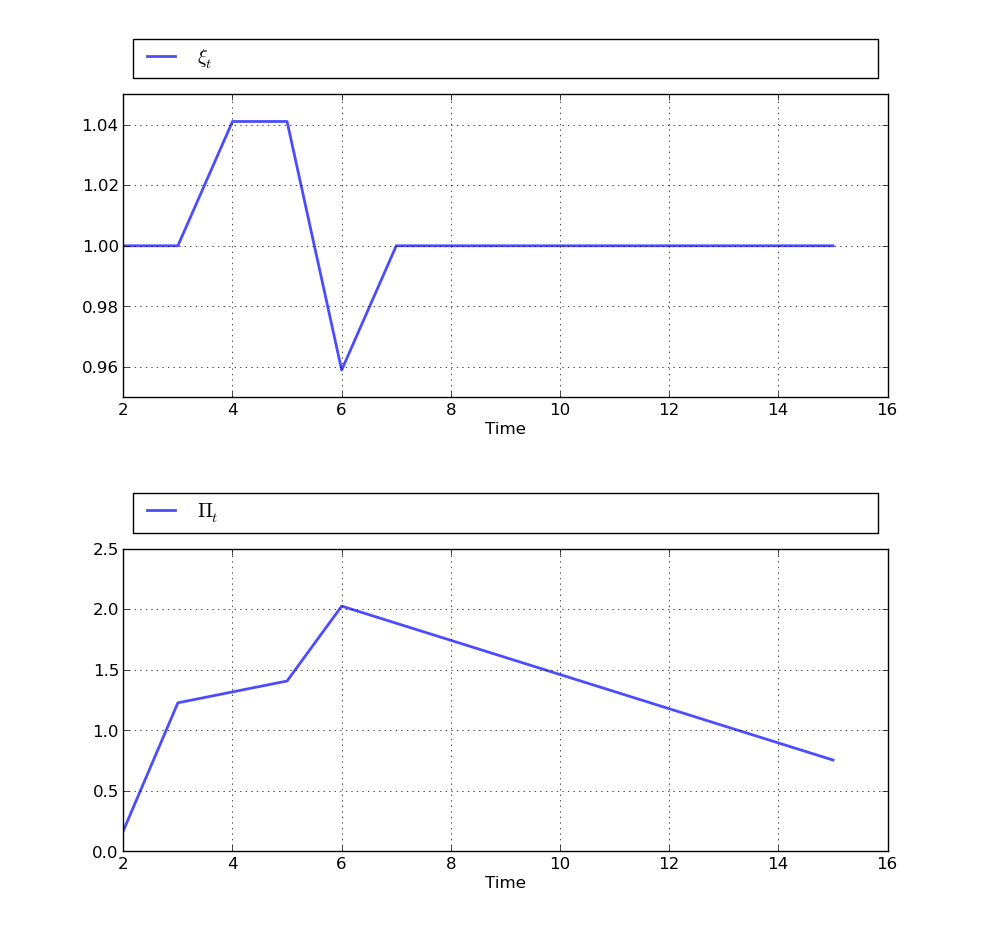
La llamada gen_fig_1 (ruta) genera la figura
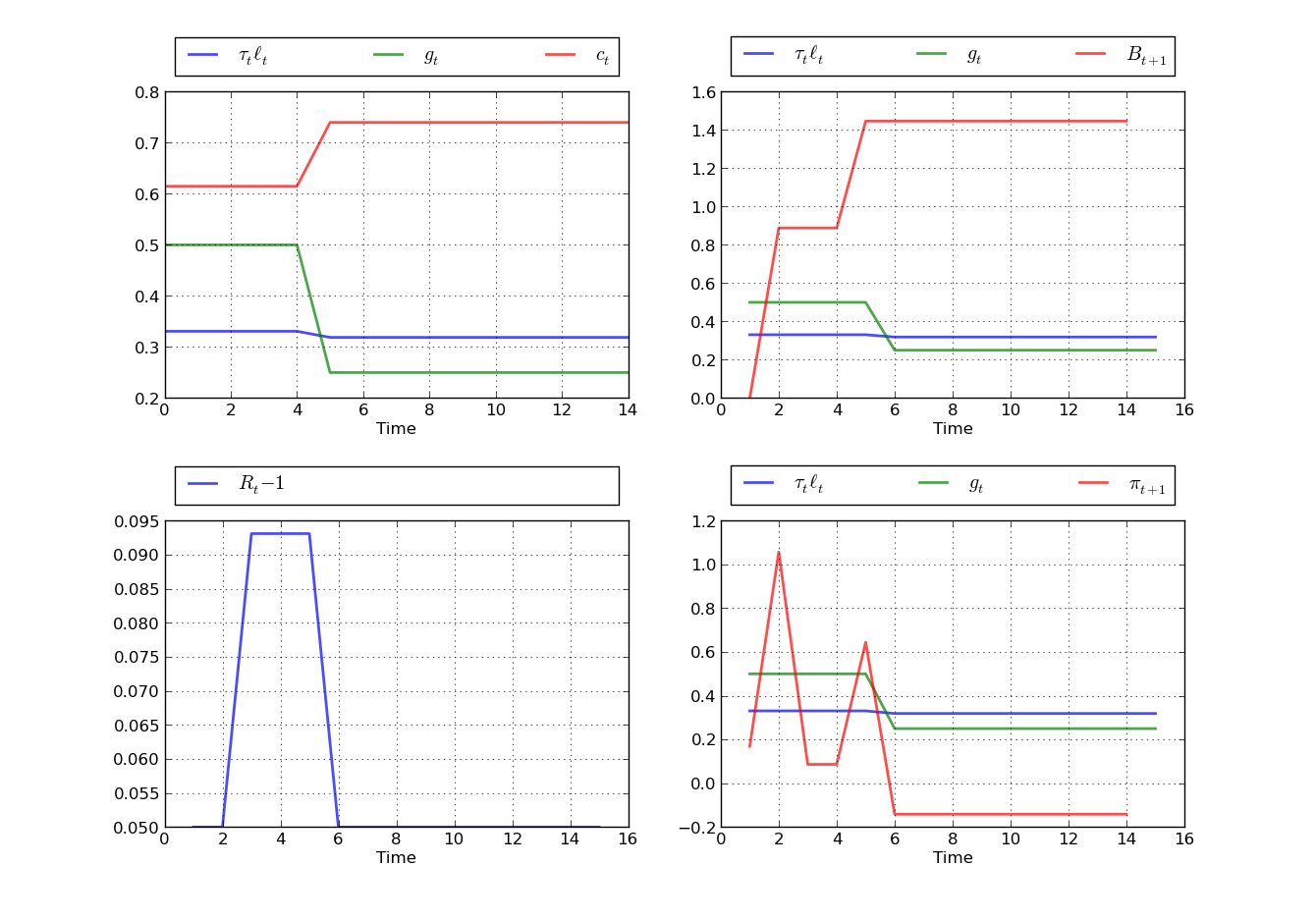
mientras gen_fig_2 (ruta) genera
Problemas ¶
Problema 1 ¶
Modificar el ejemplo VAR dado anteriormente , el establecimiento
con
Producir las cifras correspondientes
Soluciones ¶
Solución extrapolable